教授 稲葉 毅
研究紹介
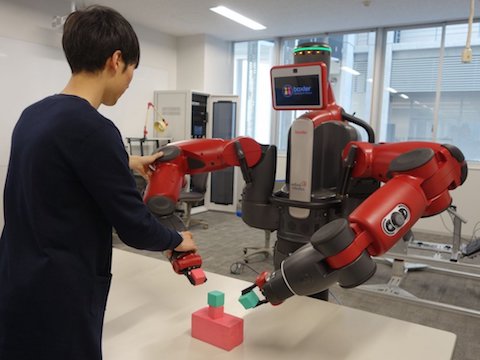
本研究室では,ロボットなどの機械システムを人間が主体的に操作・操縦するシステム「人間-機械制御系」を対象に,人間にとって操作しやすいシステムとする ための制御手法を中心に研究しています.人間-機械制御系の具体例は,自動車・航空機の操縦,介助補助用パワーアシストシステム,人間とロボットの協調作 業システムなど,身近なものから今後発展 が期待される分野まで幅広く存在します.一般に,人間は操作対象の特性に応じて適応的に自分自身の特性を変化させる性質があります.本研究室ではその性質 を制御工学的にとらえ,システム全体の安定性の補償や,操作性の高い人間-機械制御系の設計に利用することを検討しています.