教授 鈴木 昌和

専門分野
制御工学、ロボティクス
専攻/研究領域
機械工学専攻/機械力学・制御工学領域
研究紹介
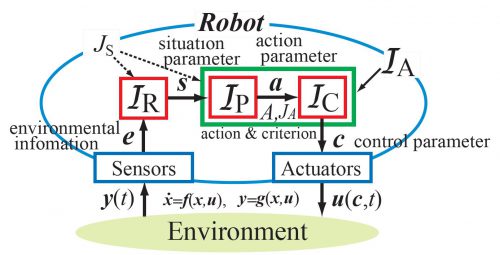
複雑な工学問題の多くは、大規模適応進化システムの学習指向最適化問題として定式化できます。我が国の将来を多方面から支えるであろうロボットの知能構築は、そのチャレンジングな典型例です。多才な知能ロボットの実現を目指して、
・単純動作から複雑行動を自律的に実現する知能化方法論である知的合成動作制御法
・経験知識を活用して効率的に大規模学習問題を解く手法である多段階遺伝的アルゴリズム
・多様な動作を器用に実現する人工筋肉型アクチュエータであるストランド筋アクチュエータ
などの研究室オリジナルのツールを駆使しつつ、行動知能のモデリングとその効率的構築、人工筋駆動ロボットの動作制御、複雑協調行動の多段階実現などを進めています。
知能ロボット以外の大規模適応進化システムとして大規模航空交通流管理やスマートコミュニティの学習指向最適実現も取り組んでいます。